P pi pd pid controllers pdf Health
Controllers and Controlled Systems 1 control. This is achieved by setting the other parameters to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence
A Synthesis of Electronically Controllable Current-Mode PI
How Does a PID Controller Work? Structure & Tuning Methods. As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know, mic behavior of a P controlled system after a step change in the input varia-8 Fundamentals ⋅Controllers and Controlled Systems SAMSON AG ⋅ V74/ DKE y q = K * ys q y Fig. 1: Proportional controlled system; reference variable: flow rate P control action with-out any lag ….
A Complete Introduction To PID Controller With MATLAB Code.This PID Controller Smple Explanation Will Give You Insights about Use of P,PI,PD & PID Controller In PI-PD structure, the inner feedback con- troller, PD, converts the integrating or unstable plant transfer functions to a stable open loop trans- fer function. Then, the feedforward controller, PI, controls the overall stable process. The parameters of the PI-PD controller were found by a simple algebraic method based on the ISTE standard form.
As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know 6/28/2006В В· difference between P,PI,PD and PID controllers? in process control. Answer produces the difference of previous and present control action. a combination of p controller and i controller is a PI controller. similarly for the PD and PID controller. P is proportional controllers which control a process by multiplying a numerical value
Specify PI-D and I-PD Controllers About PI-D and I-PD Controllers. PI-D and I-PD controllers are used to mitigate the influence of changes in the reference signal on the control signal. These controllers are variants of the 2DOF PID controller. The general formula of a parallel-form 2DOF PID controller is: A PD controller uses the same principles to create a virtual spring and damper between the measured and reference positions of a system. Above is an example showing a simulated point-mass (blue dot) that is tracking a target (green circle). Try clicking or dragging to move the target around.
95% of the control loops are of PID type, most loops are actually PI con-trol. PID controllers are today found in all areas where control is used. The controllers come in many different forms. There are stand-alone sys-tems in boxes for one or a few loops, which are manufactured by the hundred thousands yearly. A Complete Introduction To PID Controller With MATLAB Code.This PID Controller Smple Explanation Will Give You Insights about Use of P,PI,PD & PID Controller
Specify PI-D and I-PD Controllers About PI-D and I-PD Controllers. PI-D and I-PD controllers are used to mitigate the influence of changes in the reference signal on the control signal. These controllers are variants of the 2DOF PID controller. The general formula of a parallel-form 2DOF PID controller is: An introduction and tutorial for PID controllers, PID stands for Proportional Integral Derivative, 3 separate parts joined together, though sometimes you don't need all three. For example, you could instead have just P control, PI control or PD control. Throughout this document I have included examples of pseudocode – an informal language
An introduction and tutorial for PID controllers, PID stands for Proportional Integral Derivative, 3 separate parts joined together, though sometimes you don't need all three. For example, you could instead have just P control, PI control or PD control. Throughout this document I have included examples of pseudocode – an informal language Specify PI-D and I-PD Controllers About PI-D and I-PD Controllers. PI-D and I-PD controllers are used to mitigate the influence of changes in the reference signal on the control signal. These controllers are variants of the 2DOF PID controller. The general formula of a parallel-form 2DOF PID controller is:
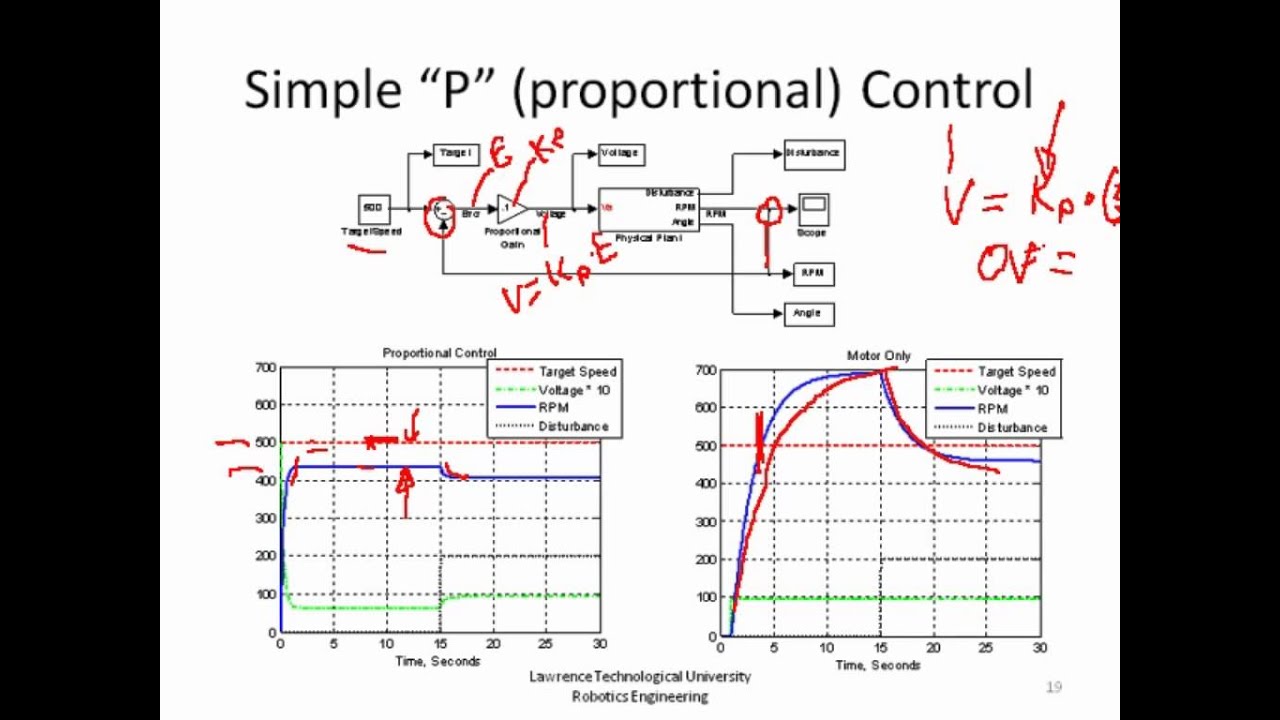
p, pd, pi, pid controllers. Download PDF . 98 downloads 291 on Loop Tuning Loop Tuning Manual Tuning Method Ziegler-Nichols Method Cohen-Coon Tuning Method Transient Responses of P, PD, PI and PID controllers Transient Response of P Controller Transient Response of P-D Controller Transient Response of P-I Controller Transient Response of P 4/15/2018В В· Comparison of P, PI, PD and PID controller in control system engineering by engineering funda Three Basic Mechanisms for Pneumatic Controllers - Duration: 4:41. RedVectorOnline 20,093
95% of the control loops are of PID type, most loops are actually PI con-trol. PID controllers are today found in all areas where control is used. The controllers come in many different forms. There are stand-alone sys-tems in boxes for one or a few loops, which are manufactured by the hundred thousands yearly. 4/15/2018В В· Comparison of P, PI, PD and PID controller in control system engineering by engineering funda Three Basic Mechanisms for Pneumatic Controllers - Duration: 4:41. RedVectorOnline 20,093
A Complete Introduction To PID Controller With MATLAB Code.This PID Controller Smple Explanation Will Give You Insights about Use of P,PI,PD & PID Controller In PI-PD structure, the inner feedback con- troller, PD, converts the integrating or unstable plant transfer functions to a stable open loop trans- fer function. Then, the feedforward controller, PI, controls the overall stable process. The parameters of the PI-PD controller were found by a simple algebraic method based on the ISTE standard form.
P, PD, PI, PID CONTROLLERS Year: 2014 Language: english Author: Sena TEMEL, Semih YAДћLI, Semih GГ–REN Genre: Reference book Format: PDF Quality: eBook Pages count: 64 Description: The book is mainly about P, P-D, P-I and P-I-D controllers, their digital versus continuous time realizations and their characteristics including sampling period effects on the response of digital ones. 10/23/2019В В· Proportional and integral controllers (PI Controller) Proportional and derivative controllers (PD Controller) Proportional integral derivative control (PID Controller) Now we will discuss each of these control modes in detail below. Proportional Controllers.
Designing PID Controllers with PID Tuner MATLAB

PD-controllers MatthewPeterKelly. Fuzzy controllers (P, PI, PD, and PID) has been designed and tuned for third order system with such a high dead time which is difficult to control by the use of conventional conventional & Fuzzy logic P,PI,PD,PID controller for higher order with high delay time nonlinear plant., PID Tuner can design 2-DOF PID controllers in which the setpoint weights can be free and tunable parameters.PID Tuner can also design controllers in which the setpoint weights are fixed in common control configurations, such as I-PD and PI-D.. You can analyze the design using a variety of response plots, and interactively adjust the design to meet your performance requirements..
p pd pi pid controllers MAFIADOC.COM
An introduction and tutorial for PID controllers by. As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know https://en.wikipedia.org/wiki/Talk:PID_controller 3/27/2017В В· The mentioned controllers are the simplest type of linear controllers available. I would generally not use any of them, except is some specific circumstances. There is no (obvious) way to explain the differences without having some basic knowledge....
This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know
This is achieved by setting the unused parameters to zero and is called a PI, PD, P or I controller in the absence of the other control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence of an integral term may prevent the system from reaching its target value. Applicability 7. PID Controllers 7.2 Choice of controller type The choice between controller types such as P, PI, PD, PID is considered. In principle, the simplest controller that can do the job should be chosen. An on-off controller is the simplest type of controller, where the control signal has only two levels. If the variables are defined such that a
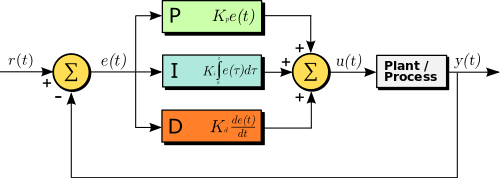
PI, PD, PID CONTROLLERS Group Members: Kemal ARI Faik Tekin ASAL Mert COЕћGUN. EE 402 RECITATION #4 PRESENTATION REPORT Basic Controller Types PID controllers use a 3 basic behavior types or modes: P - proportional, I - integrative and D - derivative. While proportional and integrative modes are also used as 95% of the control loops are of PID type, most loops are actually PI con-trol. PID controllers are today found in all areas where control is used. The controllers come in many different forms. There are stand-alone sys-tems in boxes for one or a few loops, which are manufactured by the hundred thousands yearly.
p, pd, pi, pid controllers. Download PDF . 98 downloads 291 on Loop Tuning Loop Tuning Manual Tuning Method Ziegler-Nichols Method Cohen-Coon Tuning Method Transient Responses of P, PD, PI and PID controllers Transient Response of P Controller Transient Response of P-D Controller Transient Response of P-I Controller Transient Response of P PID control autotune in TERA's devices: The main thing that determines the quality of PID controller is its ability to achieve a setpoint temperature accurately and fast. For this purpose all modern PID controllers have autotune function. Standard algorithms of auto-tuning PID does not exist, in practice each manufacturer uses its own algorithm.
p, pd, pi, pid controllers. Download PDF . 98 downloads 291 on Loop Tuning Loop Tuning Manual Tuning Method Ziegler-Nichols Method Cohen-Coon Tuning Method Transient Responses of P, PD, PI and PID controllers Transient Response of P Controller Transient Response of P-D Controller Transient Response of P-I Controller Transient Response of P 3/27/2017В В· The mentioned controllers are the simplest type of linear controllers available. I would generally not use any of them, except is some specific circumstances. There is no (obvious) way to explain the differences without having some basic knowledge...
PID controllers are found in a wide range of applications for industrial process control. I and D in PID controller by Zeigler-Nichols table depends on the controller used like P, PI or PID, as shown below. Zeigler-Nichols table Combinations like PI and PD controls are very often used in practical applications. This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to
mic behavior of a P controlled system after a step change in the input varia-8 Fundamentals ⋅Controllers and Controlled Systems SAMSON AG ⋅ V74/ DKE y q = K * ys q y Fig. 1: Proportional controlled system; reference variable: flow rate P control action with-out any lag … 7. PID Controllers 7.2 Choice of controller type The choice between controller types such as P, PI, PD, PID is considered. In principle, the simplest controller that can do the job should be chosen. An on-off controller is the simplest type of controller, where the control signal has only two levels. If the variables are defined such that a
P, PD, PI, PID CONTROLLERS Year: 2014 Language: english Author: Sena TEMEL, Semih YAДћLI, Semih GГ–REN Genre: Reference book Format: PDF Quality: eBook Pages count: 64 Description: The book is mainly about P, P-D, P-I and P-I-D controllers, their digital versus continuous time realizations and their characteristics including sampling period effects on the response of digital ones. P - Controller PI - Controller PD - Controller PID - Controller PID PI PD PID. 3 9 аёЈаё°аёљаёљаё—аёµа№€аёЎаёµаё•аё±аё§аё„аё§аёљаё„ аёёаёЎа№Ѓаёљаёљаёћ ีไаёаё”аёµ
Digital PID Controller Design TCHEBYSHEV REPRESENTATION AND ROOT CLUSTERING Tchebyshev representation of real polynomials ВІ Consider a real polynomial P(z)=a nzn +a nВЎ1znВЎ1 +ВўВўВў+a 1z +a 0 ВІ The image of P(z) evaluated on the circle C ВЅ of radius ВЅ, centered at the origin is: PID Tuner can design 2-DOF PID controllers in which the setpoint weights can be free and tunable parameters.PID Tuner can also design controllers in which the setpoint weights are fixed in common control configurations, such as I-PD and PI-D.. You can analyze the design using a variety of response plots, and interactively adjust the design to meet your performance requirements.
An introduction and tutorial for PID controllers, PID stands for Proportional Integral Derivative, 3 separate parts joined together, though sometimes you don't need all three. For example, you could instead have just P control, PI control or PD control. Throughout this document I have included examples of pseudocode – an informal language Specify PI-D and I-PD Controllers About PI-D and I-PD Controllers. PI-D and I-PD controllers are used to mitigate the influence of changes in the reference signal on the control signal. These controllers are variants of the 2DOF PID controller. The general formula of a parallel-form 2DOF PID controller is:
mic behavior of a P controlled system after a step change in the input varia-8 Fundamentals ⋅Controllers and Controlled Systems SAMSON AG ⋅ V74/ DKE y q = K * ys q y Fig. 1: Proportional controlled system; reference variable: flow rate P control action with-out any lag … Fuzzy controllers (P, PI, PD, and PID) has been designed and tuned for third order system with such a high dead time which is difficult to control by the use of conventional conventional & Fuzzy logic P,PI,PD,PID controller for higher order with high delay time nonlinear plant.
Introduction to PID Controller With Detailed PPIPD & PD

Digital PID Controller DesignDigital PID Controller Design. The proportional gain, the integral and derivative time constants can be independently controlled. This paper also presents PD, PI and PID controllers in a single unit using modified DVCCTA. One of the three controllers can be operated at a time by appropriate connection to the input terminals C 1, C 2 and C 3. The analysis of theoretically, As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know.
7. PID Controllers
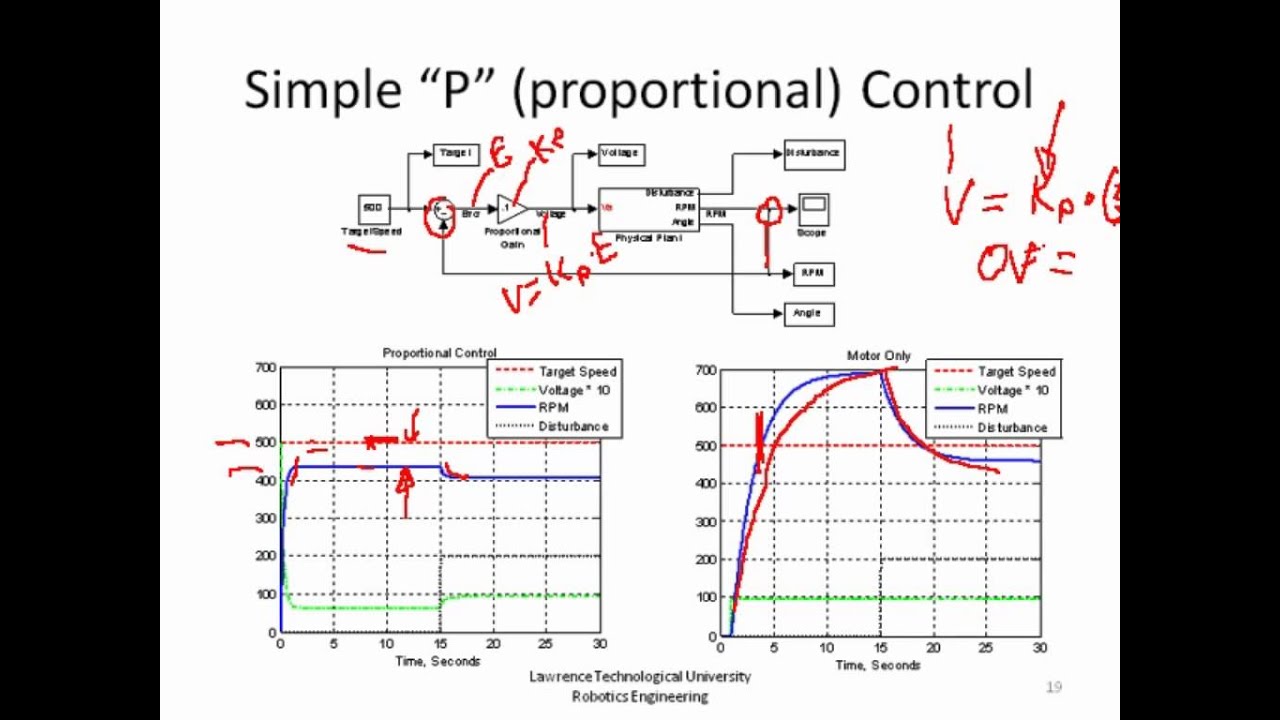
LECTURES ON PID CONTROLLERS UTA. 9/10/2014 · Proportional Integral (PI) controllers are the most popular industrial applications of PID controllers. These controllers have no derivative component and typically have only 2 …, PERFORMANCE COMPARISON OF P, PI, AND PID CONTROLLERS. It is to be noted that, when gain is increasing speed of response is increasing in case of P and PID controller but in PI controller gain of response is decreasing. In PID controller there is a minor decrease or no changes are shown in various parameter which can see from table 1 and table 2.
P - Controller PI - Controller PD - Controller PID - Controller PID PI PD PID. 3 9 аёЈаё°аёљаёљаё—аёµа№€аёЎаёµаё•аё±аё§аё„аё§аёљаё„ аёёаёЎа№Ѓаёљаёљаёћ ีไаёаё”аёµ 6/28/2006В В· difference between P,PI,PD and PID controllers? in process control. Answer produces the difference of previous and present control action. a combination of p controller and i controller is a PI controller. similarly for the PD and PID controller. P is proportional controllers which control a process by multiplying a numerical value
sections: Proportional (P), Integral (I), Derivative (D) transfers and adder. Proportional-integral (PI), Propor-tional-derivative (PD) and PID controllers with adjust-able parameters are implemented in various pieces of work. These controllers are used in many applications, for example, motor speed controllers, temperature con- This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to
control. This is achieved by setting the other parameters to zero. A PID controller will be called a PI, PD, P or I controller in the absence of the respective control actions. PI controllers are fairly common, since derivative action is sensitive to measurement noise, whereas the absence P, PD, PI, PID CONTROLLERS Year: 2014 Language: english Author: Sena TEMEL, Semih YAДћLI, Semih GГ–REN Genre: Reference book Format: PDF Quality: eBook Pages count: 64 Description: The book is mainly about P, P-D, P-I and P-I-D controllers, their digital versus continuous time realizations and their characteristics including sampling period effects on the response of digital ones.
PID control autotune in TERA's devices: The main thing that determines the quality of PID controller is its ability to achieve a setpoint temperature accurately and fast. For this purpose all modern PID controllers have autotune function. Standard algorithms of auto-tuning PID does not exist, in practice each manufacturer uses its own algorithm. A Complete Introduction To PID Controller With MATLAB Code.This PID Controller Smple Explanation Will Give You Insights about Use of P,PI,PD & PID Controller
7/3/2007В В· This is a follow-up to an OT discussion which was developing in the PLC forum. Peter Nachtwey offered to illustrate the differences between PID, PI-D and I-PD and I thought the discussion might be of interest to a wider audience. 6/28/2006В В· difference between P,PI,PD and PID controllers? in process control. Answer produces the difference of previous and present control action. a combination of p controller and i controller is a PI controller. similarly for the PD and PID controller. P is proportional controllers which control a process by multiplying a numerical value
This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to PID Tuner can design 2-DOF PID controllers in which the setpoint weights can be free and tunable parameters.PID Tuner can also design controllers in which the setpoint weights are fixed in common control configurations, such as I-PD and PI-D.. You can analyze the design using a variety of response plots, and interactively adjust the design to meet your performance requirements.
7. PID Controllers 7.2 Choice of controller type The choice between controller types such as P, PI, PD, PID is considered. In principle, the simplest controller that can do the job should be chosen. An on-off controller is the simplest type of controller, where the control signal has only two levels. If the variables are defined such that a mic behavior of a P controlled system after a step change in the input varia-8 Fundamentals ⋅Controllers and Controlled Systems SAMSON AG ⋅ V74/ DKE y q = K * ys q y Fig. 1: Proportional controlled system; reference variable: flow rate P control action with-out any lag …
The PI-PD controller structure provides an excellent four-parameter controller for control of integrating, unstable and resonant processes to set point changes while the conventional PID controller has limitations in controlling such systems. In this paper, a graphical method for the computation of all stabilizing PI-PD controllers is given. A Complete Introduction To PID Controller With MATLAB Code.This PID Controller Smple Explanation Will Give You Insights about Use of P,PI,PD & PID Controller
95% of the control loops are of PID type, most loops are actually PI con-trol. PID controllers are today found in all areas where control is used. The controllers come in many different forms. There are stand-alone sys-tems in boxes for one or a few loops, which are manufactured by the hundred thousands yearly. This article answers the question what is a PID controller, how do PID controllers work and what is the theory behind PID. What is a PID controller? A PID (Proportional Integral Derivative) controller is a common instrument used in industrial control applications. A PID controller can be used for regulation of speed, temperature, flow, pressure
P, PD, PI, PID CONTROLLERS Year: 2014 Language: english Author: Sena TEMEL, Semih YAДћLI, Semih GГ–REN Genre: Reference book Format: PDF Quality: eBook Pages count: 64 Description: The book is mainly about P, P-D, P-I and P-I-D controllers, their digital versus continuous time realizations and their characteristics including sampling period effects on the response of digital ones. In PI-PD structure, the inner feedback con- troller, PD, converts the integrating or unstable plant transfer functions to a stable open loop trans- fer function. Then, the feedforward controller, PI, controls the overall stable process. The parameters of the PI-PD controller were found by a simple algebraic method based on the ISTE standard form.
Designing PID Controllers with PID Tuner MATLAB

Types of Controllers Proportional Integral and. PID Control Theory 221 While PID controllers are applicable to many control problems, and often perform satisfactorily without any improvements or even tuning, they can perform poorly in some applications, and do not in general provide optimal control. 3. Fractional systems, Configure your Simulink PID Controller block for PID algorithm (P,PI, or PID), controller form (parallel or standard), anti-windup protection (on or off), and controller output saturation (on or off) Automatically tune controller gains against a plant model and fine-tune your design interactively.
Differences between PID PI-D and I-PD Control Systems
When to use P PI PD PID controllers? AskEngineers. Digital PID Controller Design TCHEBYSHEV REPRESENTATION AND ROOT CLUSTERING Tchebyshev representation of real polynomials ВІ Consider a real polynomial P(z)=a nzn +a nВЎ1znВЎ1 +ВўВўВў+a 1z +a 0 ВІ The image of P(z) evaluated on the circle C ВЅ of radius ВЅ, centered at the origin is: https://fr.wikipedia.org/wiki/M%C3%A9thode_de_Ziegler-Nichols Summary of P, PI, PD, and PID control systems Requirements Transient response specified by the desired Controllers P PD PI PID Controller Trans. Func. K K(s+a 1) s K(s +a 2) s K(s +a 1)(s +a 2) Open-Loop Trans. Func. 1. design a PD controller to achieve the desired transient response 2. design a PI controller to reduce.
PI, PD, PID CONTROLLERS Group Members: Kemal ARI Faik Tekin ASAL Mert COЕћGUN. EE 402 RECITATION #4 PRESENTATION REPORT Basic Controller Types PID controllers use a 3 basic behavior types or modes: P - proportional, I - integrative and D - derivative. While proportional and integrative modes are also used as This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to
7/3/2007В В· This is a follow-up to an OT discussion which was developing in the PLC forum. Peter Nachtwey offered to illustrate the differences between PID, PI-D and I-PD and I thought the discussion might be of interest to a wider audience. A PD controller uses the same principles to create a virtual spring and damper between the measured and reference positions of a system. Above is an example showing a simulated point-mass (blue dot) that is tracking a target (green circle). Try clicking or dragging to move the target around.
Configure your Simulink PID Controller block for PID algorithm (P,PI, or PID), controller form (parallel or standard), anti-windup protection (on or off), and controller output saturation (on or off) Automatically tune controller gains against a plant model and fine-tune your design interactively This article describes the design of Proportional (P), Proportional Integral (PI) and Proportional Integral Derivative (PID) controllers, using mathematical modeling, simulation and electronic implementation of the dynamic behavior of a servo-hydraulic system, through the application of …
As conventional controllers we can count a controllers known for years now, such as P, PI, PD, PID, Otto-Smith, all their different types and realizations, and other controller types2. It is a characteristic of all conventional controllers that one has to know P - Controller PI - Controller PD - Controller PID - Controller PID PI PD PID. 3 9 аёЈаё°аёљаёљаё—аёµа№€аёЎаёµаё•аё±аё§аё„аё§аёљаё„ аёёаёЎа№Ѓаёљаёљаёћ ีไаёаё”аёµ
Introduction to PID Control Introduction This introduction will show you the characteristics of the each of proportional (P), the integral (I), and the derivative (D) controls, and how to use them to obtain a desired response. In this tutorial, we will consider the following unity feedback system: Plant: A … This article addresses the design of PID, I-PD and PD-PI controller for the ball and beam system. The ball and beam system, a non linear one, has been linearised around the equilibrium point to
p, pd, pi, pid controllers. Download PDF . 98 downloads 291 on Loop Tuning Loop Tuning Manual Tuning Method Ziegler-Nichols Method Cohen-Coon Tuning Method Transient Responses of P, PD, PI and PID controllers Transient Response of P Controller Transient Response of P-D Controller Transient Response of P-I Controller Transient Response of P PID Tuner can design 2-DOF PID controllers in which the setpoint weights can be free and tunable parameters.PID Tuner can also design controllers in which the setpoint weights are fixed in common control configurations, such as I-PD and PI-D.. You can analyze the design using a variety of response plots, and interactively adjust the design to meet your performance requirements.
EE392m - Winter 2003 Control Engineering 4-1 Lecture 4 - PID Control • 90% (or more) of control loops in industry are PID • Simple control design model → simple controller The proportional gain, the integral and derivative time constants can be independently controlled. This paper also presents PD, PI and PID controllers in a single unit using modified DVCCTA. One of the three controllers can be operated at a time by appropriate connection to the input terminals C 1, C 2 and C 3. The analysis of theoretically
PI, PD, PID CONTROLLERS Group Members: Kemal ARI Faik Tekin ASAL Mert COЕћGUN. EE 402 RECITATION #4 PRESENTATION REPORT Basic Controller Types PID controllers use a 3 basic behavior types or modes: P - proportional, I - integrative and D - derivative. While proportional and integrative modes are also used as Configure your Simulink PID Controller block for PID algorithm (P,PI, or PID), controller form (parallel or standard), anti-windup protection (on or off), and controller output saturation (on or off) Automatically tune controller gains against a plant model and fine-tune your design interactively
sections: Proportional (P), Integral (I), Derivative (D) transfers and adder. Proportional-integral (PI), Propor-tional-derivative (PD) and PID controllers with adjust-able parameters are implemented in various pieces of work. These controllers are used in many applications, for example, motor speed controllers, temperature con- This article describes the design of Proportional (P), Proportional Integral (PI) and Proportional Integral Derivative (PID) controllers, using mathematical modeling, simulation and electronic implementation of the dynamic behavior of a servo-hydraulic system, through the application of …
P, PD, PI, PID CONTROLLERS Year: 2014 Language: english Author: Sena TEMEL, Semih YAДћLI, Semih GГ–REN Genre: Reference book Format: PDF Quality: eBook Pages count: 64 Description: The book is mainly about P, P-D, P-I and P-I-D controllers, their digital versus continuous time realizations and their characteristics including sampling period effects on the response of digital ones. PID Control Theory 221 While PID controllers are applicable to many control problems, and often perform satisfactorily without any improvements or even tuning, they can perform poorly in some applications, and do not in general provide optimal control. 3. Fractional systems
In PI-PD structure, the inner feedback con- troller, PD, converts the integrating or unstable plant transfer functions to a stable open loop trans- fer function. Then, the feedforward controller, PI, controls the overall stable process. The parameters of the PI-PD controller were found by a simple algebraic method based on the ISTE standard form. 5/7/2016В В· When to use P, PI, PD, PID controllers? (P, PI, PD, PID). And it's not really related to the fact of whether the system is 'slow' or 'fast'. That's not important, because your gains take that into account. I most commonly use PD gains because they are easy to implement and tune. With the systems I'm using the integral term can 'wind-up' in